Seri: Omurga, Hareket ve Ağrı
Seri açıklaması: Nöromüsküler Mekanizmalar ve Hareket Analizi
Kategori: Beden Mekaniği & Hareket
Alt kategori: Travma & Beden
Omurga Biyomekaniği: Cat–Cow Üzerinden Segmental Hareket ve Stabilite (Part 3)
Cat–Cow hareketini segmental kontrol, düşük yük altında stabilizasyon ve omurga biyomekaniği bağlamında inceleyen; bu egzersizin neden basit bir mobilite hareketinden daha fazlası olduğunu açıklayan derinlemesine bir analiz.
Cat–Cow (Marjaryasana–Bitilasana), quadruped pozisyonda gerçekleştirilen ve omurganın segmental fleksiyon–ekstansiyonunu düşük yük koşullarında organize eden bir model olarak ele alınabilir. Bu hareket, global mobiliteden çok segmental kontrolü ve nöromüsküler stabiliteyi hedefleyen bir sistem olarak incelendiğinde, basit bir egzersizin ötesinde bir işlev kazanır.
Modern yaşamda uzun süreli oturma ve düşük hareket varyabilitesi, omurganın segmental hareket kapasitesinin azalmasına ve kontrolün daha global, blok hareket paternlerine kaymasına neden olabilir. Bu durum, özellikle bel ağrısı gibi klinik tablolarla ilişkilendirilen nöromüsküler adaptasyonları beraberinde getirir.
Bu makalede Cat–Cow hareketi; segmental hareket kontrolü, düşük yük altında stabilizasyon ve omurga biyomekaniği bağlamında ele alınmaktadır.
1. Segmental Hareket ve Propriyoseptif Kontrol
Quadruped pozisyonda Cat–Cow, doğru uygulandığında global bir omurga hareketi değil, segmental olarak dağıtılmış bir artikülasyon paternidir. Başka bir deyişle, omurga hareketi pelviste başlayan ve sakrumdan servikale doğru ardışık olarak iletilen bir dalga şeklinde organize olur.
- Hareket, lomber ve torakal segmentler boyunca segmentler arası ardışık artikülasyon ile ilerler.
- Bu aktarım servikal bölgeye kadar ulaşır.
Fleksiyon fazında (Cat) bu dalga kaudalden kraniale, yani kuyruk sokumundan başa doğru yayılırken; ekstansiyon fazında (Cow) aynı patern ters yönde organize olur.
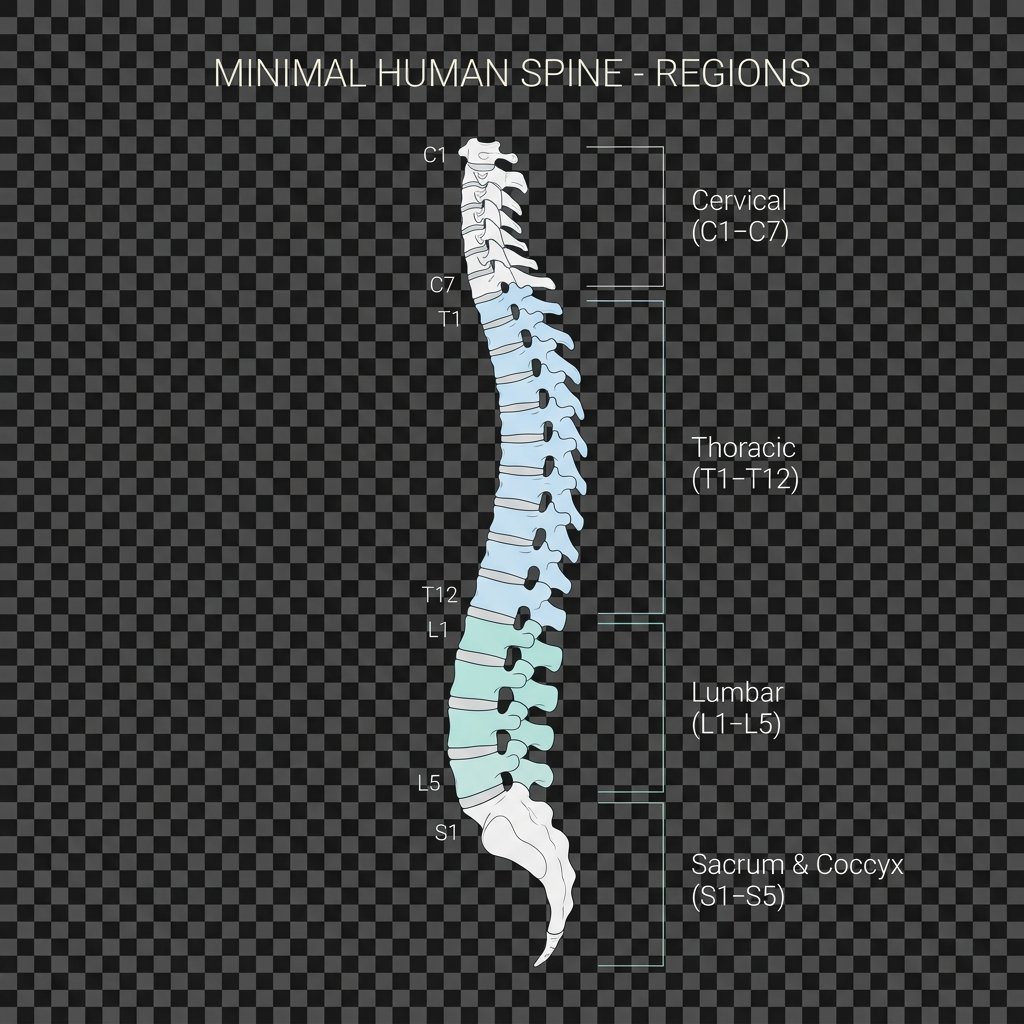
Bu bölgesel ayrım, Cat–Cow sırasında hareketin omurga boyunca nasıl yayıldığını anlamak açısından önemlidir.
Bu yapı, omurgaya uygulanan controlled articular rotations (CARs) mantığıyla doğrudan paralellik gösterir. Burada belirleyici olan unsur hareket açıklığının büyüklüğü değil, kontrol çözünürlüğüdür. Torakolomber omurgada segment başına hareket genellikle yaklaşık 3–8° aralığındadır; bu küçük açılar biyomekanik olarak anlamlıdır.
CARs yaklaşımı da benzer şekilde, büyük hareket açıklığından çok segmentler arası kontrollü ve ayrıştırılmış artikülasyonu hedefler; quadruped spinal CARs buna pratik bir örnek olarak ele alınabilir.
Bu küçük hareket aralıkları önemsiz değildir; aksine omurga kontrolünün temel birimleridir.
Motor kontrol açısından Cat–Cow:
- komşu segmentler arasında ayrıştırılmış hareket üretimini zorlar,
- “blok halinde hareket” stratejilerini azaltır,
- düzleşmiş veya hipomobil segmentlerin yeniden harekete katılmasını hedefler.
Bu nedenle egzersiz klasik anlamda bir esneme değil, dağıtılmış bir proprioseptif yeniden kalibrasyon görevi olarak değerlendirilmelidir.
2. Azaltılmış Aksiyel Yük Altında Stabilite
Quadruped, yani ellerin ve dizlerin yerde olduğu pozisyonda omurgaya binen yük, ayakta durmaya kıyasla belirgin şekilde daha azdır. Bu durum hareketin biyomekanik doğasını değiştirir.
Stabilite, omurga hareket ederken segmentlerin hizasını koruyarak dağılmadan kontrol altında kalabilmesidir.
Bu pozisyonda stabilite artık kemiklerin ve pasif yapıların taşıdığı bir özellik değildir; kasların aktif kontrolüne bağlı hale gelir. Bu nedenle Cat–Cow yalnızca bir mobilite egzersizi değil, düşük yük altında kontrol geliştiren bir stabilite egzersizi olarak da okunmalıdır.
Bu nasıl olur?
- Omurga üzerindeki baskı azalır, böylece pasif yapılar daha az yük taşır.
- Hamstring kasları büyük ölçüde devreden çıkar; bel bölgesi daha serbest hareket eder.
- Kaslar birlikte çalışmak zorunda kalır; stabilite aktif olarak sağlanır.
Hangi kaslar ne yapar?
- Fleksiyon (Cat) sırasında karın kasları daha fazla devreye girer.
- Ekstansiyon (Cow) sırasında sırt kasları, özellikle erector spinae, daha aktif hale gelir.
Ama burada önemli nokta şudur:
Bu kaslar ayakta durmaya göre daha az çalışsa da, daha dengeli ve daha koordineli biçimde devreye girer.
Yani sistem burada en fazla kasılmayı değil, en doğru koordinasyonu arar.
Kısa özet:
Cat–Cow’da stabilite, sertleşerek değil; kontrollü ve dengeli kas aktivasyonu ile sağlanır.
3. Follower Load: Kasların Omurgayı “Hizalayarak” Taşıması
Omurga yalnızca kemiklerden oluşan pasif bir yapı değildir. Günlük hareketlerde omurganın stabil kalmasını sağlayan asıl unsur, kasların ürettiği kuvvetlerdir.
Bu noktada follower load kavramı devreye girer.
Follower load, kasların omurgaya yukarıdan aşağıya bastıran bir kuvvet üretmesi değil; omurganın doğal eğrisini takip ederek segmentleri hizalı tutacak şekilde yük taşımasıdır.
Bu ne anlama gelir?
- Yük doğrudan aşağı bastırdığında omurga sıkışır, bükülme ve kayma artar.
- Kaslar doğru çalıştığında kuvvet omurganın eğrisi boyunca yönlendirilir.
- Segmentler birbirine hizalanır ve gereksiz yüklenmeler azalır.
Cat–Cow’da neden önemlidir?
- Quadruped pozisyonda aksiyel yük düşüktür.
- Ama omurga tamamen “boşta” değildir.
- Stabilite, kasların omurgayı sıkıştırmasıyla değil; hizalayarak taşımasıyla sağlanır.
Bu sistem nasıl çalışır?
- Derin kaslar, özellikle multifidus, omurga segmentlerini mikro düzeyde stabilize eder.
- Karın kasları basınç dengesi oluşturur.
- Tüm sistem birlikte çalışarak omurgayı dengede tutar.
Kısa özet:
Follower load, omurgayı ezmek değil; omurgayı hizalayarak yük taşımaktır.
Stabilite: Hareket sırasında omurganın dağılmadan hizasını koruyabilme kapasitesidir.
Follower Load: Bu stabilitenin, kasların omurganın eğrisini takip ederek kuvvet üretmesiyle sağlanma mekanizmasıdır.
4. Omurga Biyomekaniği: Fleksiyon–Ekstansiyon Döngüsü
Cat–Cow hareketi temel olarak sagital düzlemde gerçekleşir, yani öne–arkaya yönlü bir hareket oluşturur. Ancak bu hareket sırasında omurga üzerinde sürekli değişen bir yük dağılımı meydana gelir.
4.1. Fleksiyon fazında (Cat)
- Diskin ön kısmı daha fazla basınç alır.
- Arka bağ dokular gerilir.
- Sırt kasları kontrollü biçimde uzayarak, yani eksantrik çalışır.
4.2. Ekstansiyon fazında (Cow)
- Yük bu kez arka yapılara, özellikle faset eklemlere kayar.
- Diskin ön kısmındaki baskı azalır.
- Sırt kasları kısalarak, yani konsantrik çalışır.
Bu iki faz birlikte ne oluşturur?
Omurga üzerinde döngüsel bir yüklenme oluşur; yük sürekli aynı yerde kalmaz, hareket boyunca yer değiştirir.
Bu neden önemlidir?
- Disk içindeki sıvı hareketini artırır.
- Disk beslenmesini difüzyon yoluyla destekler.
- Uzun süreli sabit duruşun olumsuz etkilerini azaltır.
Basit bir benzetmeyle:
Omurga burada düşük şiddette çalışan bir “pompa” gibi davranır. Hareket ettikçe sıvı girer–çıkar ve doku canlılığını korur.
Klinik olarak ne görüyoruz?
Yoga ve benzeri hareket çalışmalarında, bu tür fleksiyon–ekstansiyon örüntülerinin hareket açıklığını artırdığı ve ağrıya bağlı kısıtlılıkları azaltabildiği gözlemlenmiştir.
Bu etkiler neden oluşur?
- düşük şiddette ama tekrarlayan yük değişimi,
- kasların daha iyi koordinasyon öğrenmesi,
- omurganın segmentler halinde yeniden hareket etmeye başlaması.
5. Sonuç (Part 3)
Cat–Cow genellikle basit bir mobilite egzersizi olarak görülür. Ancak bu yaklaşım eksiktir. Bu hareket, omurgada yalnızca hareket üretmez; aynı zamanda hareketin nasıl organize edildiğini de belirler.
Cat–Cow:
- omurgayı segmentler halinde kontrol etmeyi öğretir,
- düşük yük altında stabilite geliştirmeye olanak tanır,
- yükün omurga boyunca dengeli şekilde dağılmasını sağlar.
Bu nedenle burada değerli olan şey hareketin genişliği değil, hareketin kalitesidir.
Segmental farkındalıkla uygulandığında Cat–Cow, basit bir egzersiz olmaktan çıkar; kontrol, koordinasyon ve adaptasyon geliştiren bir sistem haline gelir.
Kaynaklar
Akademik kaynak
Valentin, S., & Licka, T. F. (2016). Spinal Motion and Muscle Activity during Active Trunk Movements – Comparing Sheep and Humans Adopting Upright and Quadrupedal Postures. PLOS ONE, 11(1), e0146362.
https://doi.org/10.1371/journal.pone.0146362
Yardımcı / açıklayıcı kaynak
Lee, C. (2018, July 26). Quadruped Spinal CARs. PhysioStrength NYC.
https://physiostrengthnyc.com/blog/2018/11/22/quadruped-spinal-cars