Série : Colonne vertébrale, Mouvement et Douleur
Description de la série : Mécanismes neuromusculaires et analyse du mouvement
Catégorie : Mécanique corporelle & Mouvement
Sous-catégorie : Traumatisme & Corps
Biomécanique de la colonne vertébrale : Mouvement segmentaire et stabilité avec Chat–Vache (Cat–Cow) (Partie 3)
Une analyse approfondie du mouvement Chat–Vache (Cat–Cow) dans le contexte du contrôle segmentaire, de la stabilisation sous faible charge et de la biomécanique de la colonne vertébrale, expliquant pourquoi cet exercice va au-delà d’un simple mouvement de mobilité.
Le mouvement Chat–Vache (Cat–Cow) (Marjaryasana–Bitilasana) peut être considéré comme un modèle organisant la flexion–extension segmentaire de la colonne vertébrale sous des conditions de faible charge en position quadrupède. Lorsqu’il est analysé comme un système visant le contrôle segmentaire et la stabilité neuromusculaire plutôt que la mobilité globale, ce mouvement acquiert une fonction dépassant celle d’un simple exercice.
Dans la vie moderne, les longues périodes en position assise et la faible variabilité des mouvements peuvent entraîner une diminution de la capacité de mouvement segmentaire de la colonne et un basculement vers des schémas de mouvement globaux et en bloc. Cette situation est associée à des adaptations neuromusculaires souvent liées à des tableaux cliniques tels que la lombalgie.
Dans cet article, le mouvement Chat–Vache (Cat–Cow) est analysé dans le cadre du contrôle du mouvement segmentaire, de la stabilisation sous faible charge et de la biomécanique vertébrale.
1. Mouvement segmentaire et Contrôle proprioceptif
En position quadrupède, lorsqu’il est correctement exécuté, le mouvement Chat–Vache (Cat–Cow) n’est pas un mouvement global de la colonne, mais un schéma d’articulation distribué de manière segmentaire. Autrement dit, le mouvement de la colonne est organisé comme une onde débutant au niveau du bassin et se propageant séquentiellement du sacrum vers la région cervicale.
- Le mouvement progresse à travers les segments lombaires et thoraciques via une articulation intersegmentaire séquentielle.
- Cette transmission atteint la région cervicale.
Pendant la phase de flexion (Chat), cette onde se propage du caudal vers le crânial, c’est-à-dire du coccyx vers la tête ; lors de la phase d’extension (Vache), le même schéma s’organise en sens inverse.
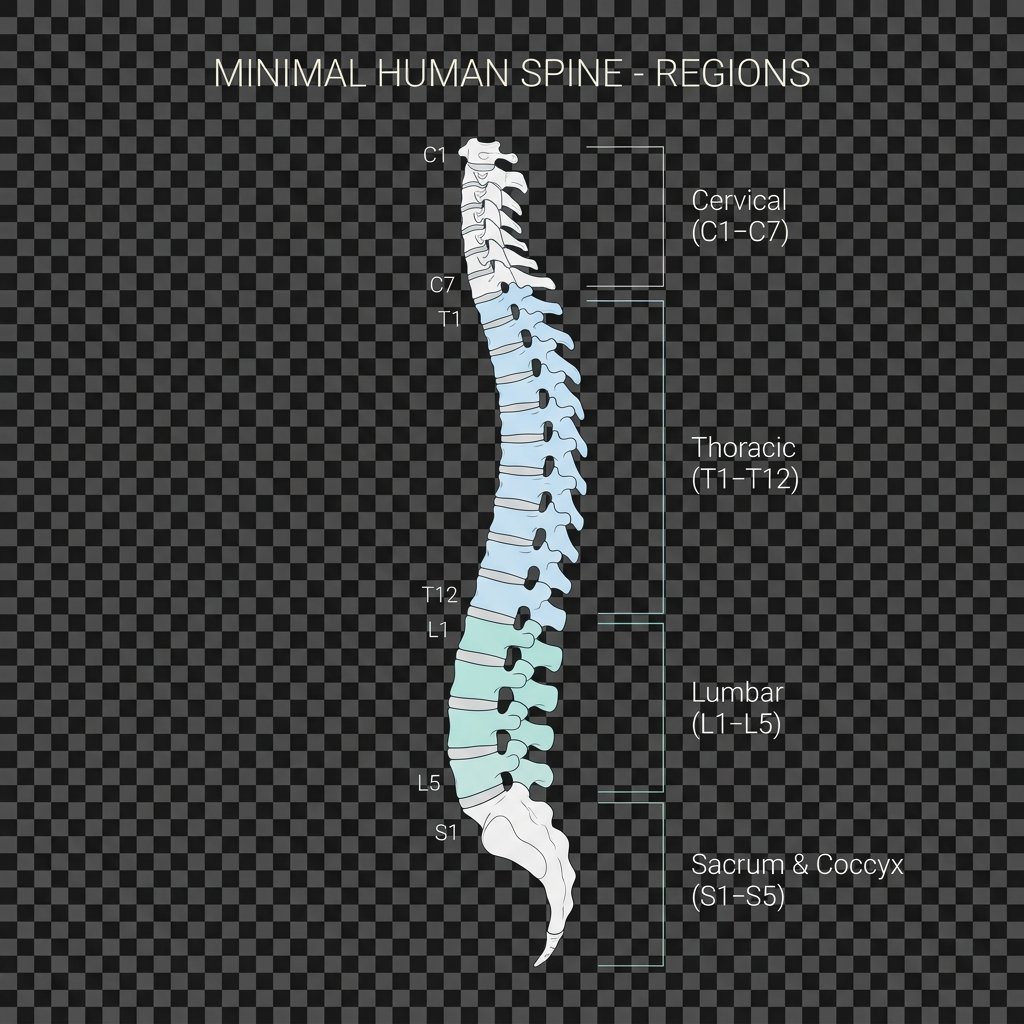
Cette distinction régionale est essentielle pour comprendre la propagation du mouvement le long de la colonne lors du Chat–Vache (Cat–Cow).
Cette structure est directement parallèle à la logique des rotations articulaires contrôlées (CARs) appliquées à la colonne. Le facteur déterminant ici n’est pas l’amplitude du mouvement, mais la résolution du contrôle. thoraco-lombaire présente généralement environ 3 à 8° de mouvement par segment ; ces faibles amplitudes sont biomécaniquement significatives.
L’approche CARs met également l’accent sur une articulation intersegmentaire contrôlée et différenciée plutôt que sur de grandes amplitudes de mouvement ; les CARs spinaux en quadrupédie peuvent être considérés comme un exemple pratique.
Ces faibles amplitudes de mouvement ne sont pas insignifiantes ; au contraire, elles constituent les unités fondamentales du contrôle vertébral.
Du point de vue du contrôle moteur, le Chat–Vache (Cat–Cow) :
- force la production de mouvements différenciés entre les segments adjacents,
- réduit les stratégies de « mouvement en bloc »,
- vise à réintégrer les segments aplatis ou hypomobiles.
Par conséquent, cet exercice ne doit pas être considéré comme un simple étirement, mais comme une tâche de recalibration proprioceptive distribuée.